SPECIFICATION REPORT
Project statement
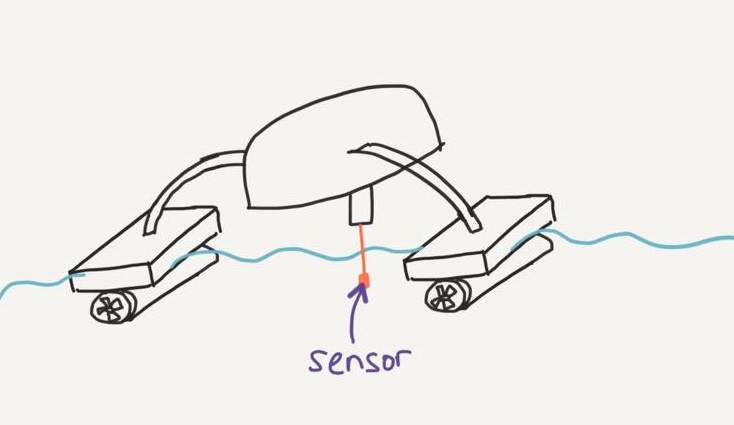
The Water Surveyor
Data required from a water body are usually taken during surveys. The pattern of the survey depends on the vehicles designed. Often boats tow sensors. The process can be also be replaced by autonomous vehicles to get uniform data in terms of depth and location.
Can we design a vehicle to take measurements of temperature of the surface in a lawn mower pattern?
Functions of the vehicle
This vehicle will be able to detect the temperature of the water surface with an accuracy of 0.1 degree celsius using the temperature sensor that we did during week 1 activity. It can be operated by 2 ways, the first is automatic control and the other is by man control.
For the automatic operation, the vehicle will be able to move by itself intelligently without people controlling.This is definitely more work-efficient and reduce unnecessary man-power. When it reaches the end of a lane, it will change directions to the next lane, which means that which it reaches a specific distance, it will automatically turn 90 degree and so on until a lawn mower pattern is achieved. If there is an obstacle halfway, the vehicle is able to detect the obstacle and send message to warn the users ( man control ) or it can automatically dodge the obstacle (automatic control).
If the automatic system malfunctions, we can switch to the man control to control the movement of the vehicle. It is a prevention for accident from happening.
Not only that, our vehicle will move in a lawn mowing pattern to obtain the temperature of surface water at different position from time to time in automatic mode. Why lawn mowing pattern? This is because by moving our vehicle with lawn mowing pattern, we can obtain data with larger coverage of area on water and also more detailed results of water temperature.
A phone app will be created for this vehicle. This apps can collect data of the water surface temperature from the vehicle and calculate out the average temperature for the surface water. Message of warning will be sent to the users through the apps when the temperature of water is whether too high or too high . This function is indispensably essential especially to biologists for them to prevent algae bloom. Early blue–green algae blooms usually develop when water temperature is higher and there is increase of light. Water temperatures above 25°C are optimal for the growth of Cyanobacteria. Hence, our product is important for biologists to take control of water temperature so that they can prepare precautionary steps to counter the algae bloom problem.
Sketches:
IDEA 1:
TOP VIEW


- When the edge knocks into the end of a lane, the case will be pressed and compressed which then hit the button. Then the vehicle will start to change direction.
Improvement:

- Main material: aluminium and polystyrene
- Ultrasonic sensor in front of the vehicle and the sides to detect obstacle or wall.
- Temperature sensor on the boat body which carries the electronic circuits.
- Thruster at two sides of the vehicle.
How the sensors work?

The vehicle start at position 1. At position 2, it getting near to the end, the front sensor and the right side sensor will activate and start to slow down by reversing the direction of motor. The vehicle will stop at position 3. It detects the wall is at the right and so take the first turn to left and turn again to left. For the rest directions turn will be alternative for example right-right, left-left, right-right and so on.
At the position 4, the vehicle slows down and stop at position 5. It turn left and left again. At position 6, even the front sensor and the right sensor is activated, but it will not affect the direction as the program is affected by the two sensors only during the first turn and not the second turn at any turn points.
At position 7, the vehicle is support to take the first turn to right but because the right sensor is activated so it affects the program and stop the vehicle at that point.
SIDE VIEW

Motor directions:

- The diagram shows how our thrusters or propellers change the direction of vehicle, whether to right or left.
- For example,if we want our vehicle to turn left, we program our propeller in a way such that the left propeller turns in reverse direction ( anti-clockwise ) while the right propeller turns in forward direction ( clockwise ) and vice versa.
IDEA 2:


- Sphere form vehicle with two thrusters or propeller at two sides.
Disadvantage:
- It is tough to find out its centre of gravity, which makes it unstable.
Phone Apps Control:

- Temperature reading up to one decimal place is shown clearly to the users.
- Control the movement of vehicle using the arrow buttons on the screen.
- The pink dot on the screen indicates the position of the vehicle, while the orange line indicates the pathway of the vehicle.
- Notice that there is a message icon on the bottom left, it is to alert the users when the temperature of water gets too high or low as well as indicating if there is an obstacle.
Other pattern of design:

- Basically a rocket-like boat with a streamlined body design.
- Has three thrusters or propellers serve as propulsion device.
- Center of body floats on air supported by two sides of thrusters on water.
Disadvantage:
- Has high centre of gravity, which makes it difficult to achieve stability on water.
Improvement:

- Lower centre of gravity
- Can be controlled to achieve desired stability on the water surface.
Sensors and Electronics:
- Temperature sensor (we already have one)
- Arduino board (we already have one)
- Arduino motor shield
~allows you to be able to power a motor with a separate power supply of up to 12v.
- motors (x2)
- Transistor
- InfraRed photodiode (x3)
- InfraRed LED (x3)
- Ultra sonic sensor (x3)
Building Materials:
- Acrylic
- Polystyrene foam
- Aluminium hollow or solid shaft
- Spring
Good ideas. Now the next step is to draw everything to scale in 3D (Inventor?). Start with the necessary stuff like Arduino, sensors, and motors to 'book' the space needed, and then only design the hull around those very important components.
ReplyDeleteFor the collision sensor, having a ring of limit switches could do I supposed, if you must really rely on a mechanical touch event. Otherwise, non-contact sensors like ultrasonic distance sensors might work but they can only detect surface obstructions that are tall enough for the sensor's sensitivity.
Hey good job on the options you have thought about!
ReplyDelete1. Your app shows the vehicle's whereabouts. How will you the information? GPS? You could work with only getting the data periodically to alert user?
2. Since you are looking into small motors, how about designing your own motor controller like the H bridge taught last semester. Will save you a lot of money.
3. I have a weatherproof Ultrasonic sensor which could be made waterproof. But you need to figure out how you can work with only one of them. https://www.sparkfun.com/products/9496
The tutorial to make it waterproof. https://www.youtube.com/watch?v=Z3vIcjI8Lmc