After rounds of discussion, we have edited and finalized the main functions of the vehicle.
Function
This vehicle will be able to detect the temperature of the water surface with an accuracy of 0.1 degree celsius using the temperature sensor that we used in the week 1 activity. The boat can be operated by 2 ways, the first is automatic control and the other is by manual control.
For the automatic operation, the vehicle will be able to move by itself intelligently without people controlling.This is definitely more work-efficient and reduce unnecessary man-power. When it reaches the end of a lane, it will change directions to the next lane, which means that which it reaches a specific distance, it will automatically turn 90 degree and so on until a lawn mower pattern is achieved.
If the automatic system malfunctions, we can switch to manual control to control the movement of the vehicle. This is to prevent an accident from happening.
Not only that, our vehicle will move in a lawn mowing pattern to obtain the temperature of surface water at different position from time to time in automatic mode. Why does it move in a lawn mowing pattern? This is because by moving our vehicle with lawn mowing pattern, we can obtain data with larger coverage of area on water and also more detailed results of water temperature.
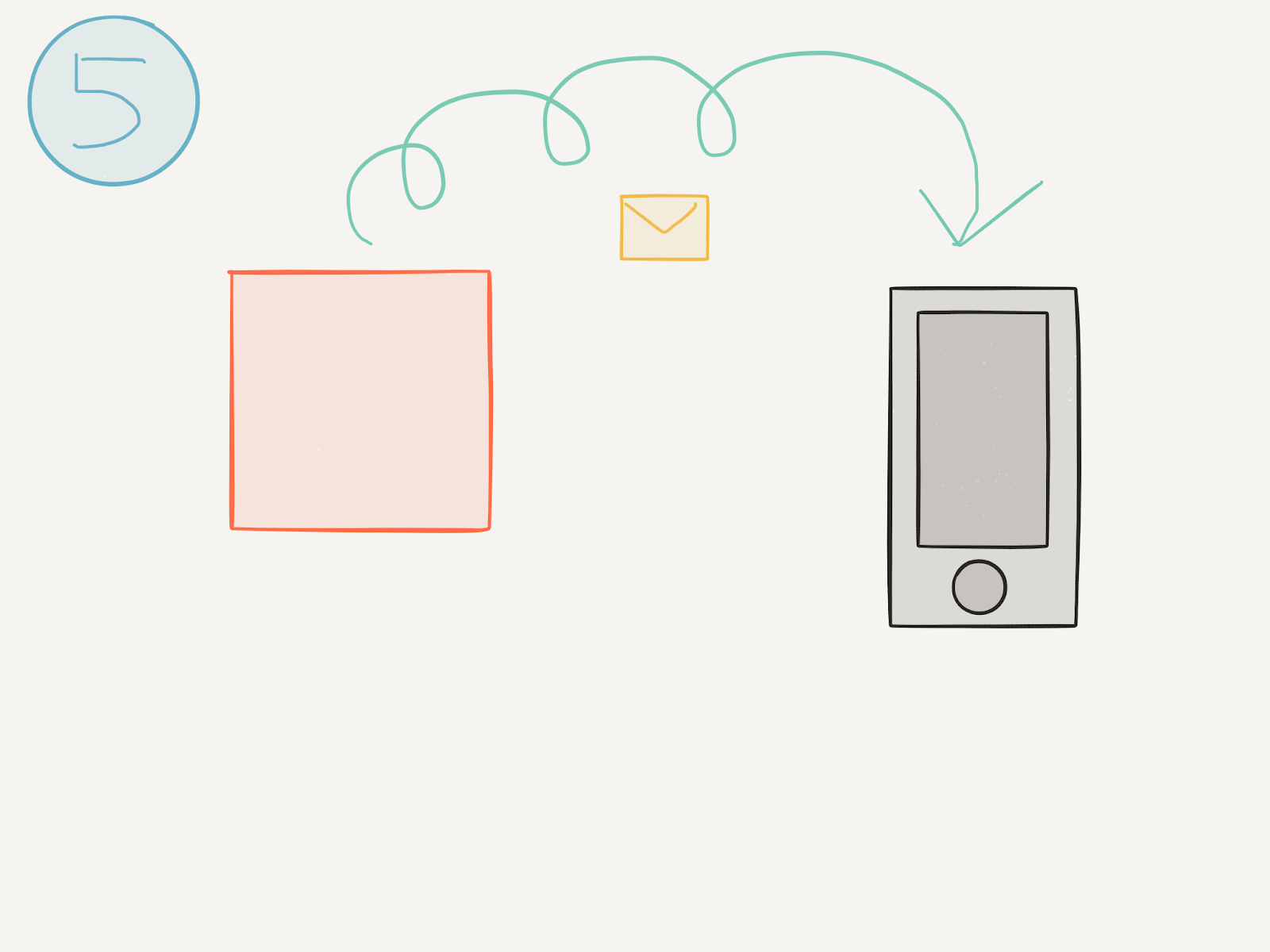
A phone app will be created for this vehicle. This apps can collect data of the water surface temperature from the vehicle and calculate out the average temperature for the surface water. A warning message will be sent to the users through the apps if the temperature of water is either too high or too low. This function is indispensably essential especially to biologists for them to prevent algae bloom. Early blue–green algae blooms usually develop when water temperature is higher and there is increase of light. Water temperatures above 25°C are optimal for the growth of Cyanobacteria. Hence, our product is important for biologists to take control of water temperature so that they can prepare precautionary steps to counter the algae bloom problem.
FINAL DESIGN
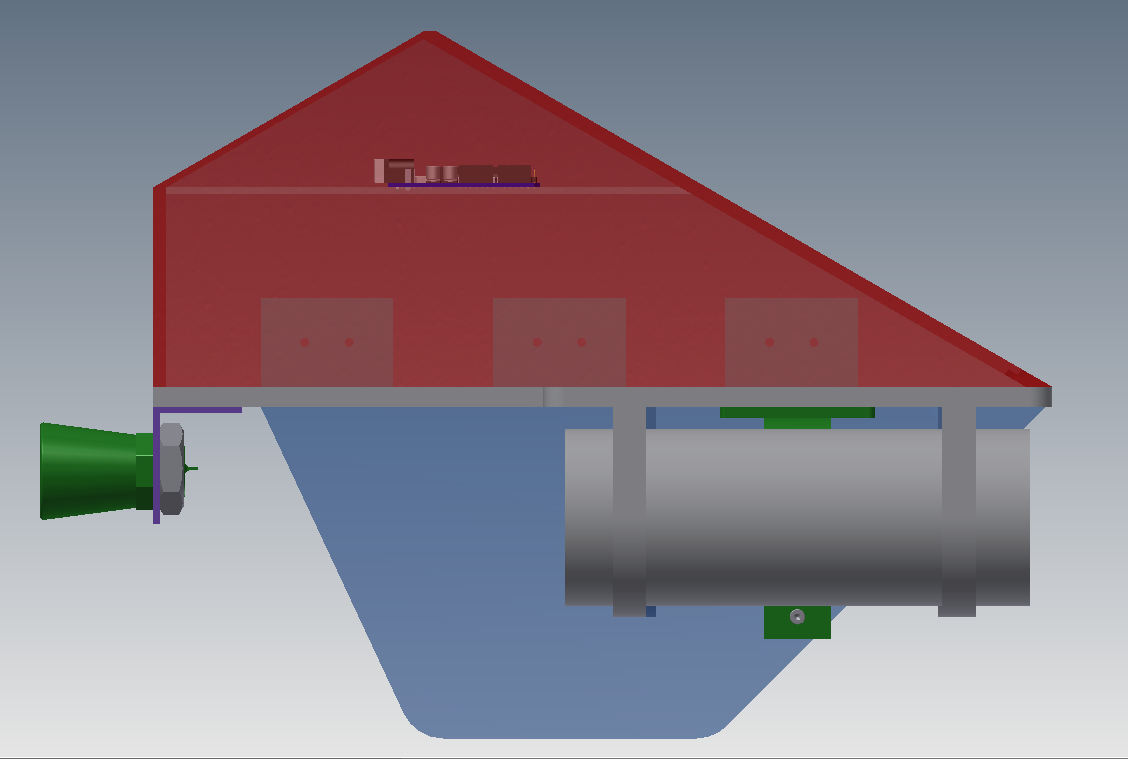
Overall structure:
Our product resembles a fighting jet. Cool, isn’t it?
The main body structure will be made by acrylic which will be laser cut in Fab Lab.
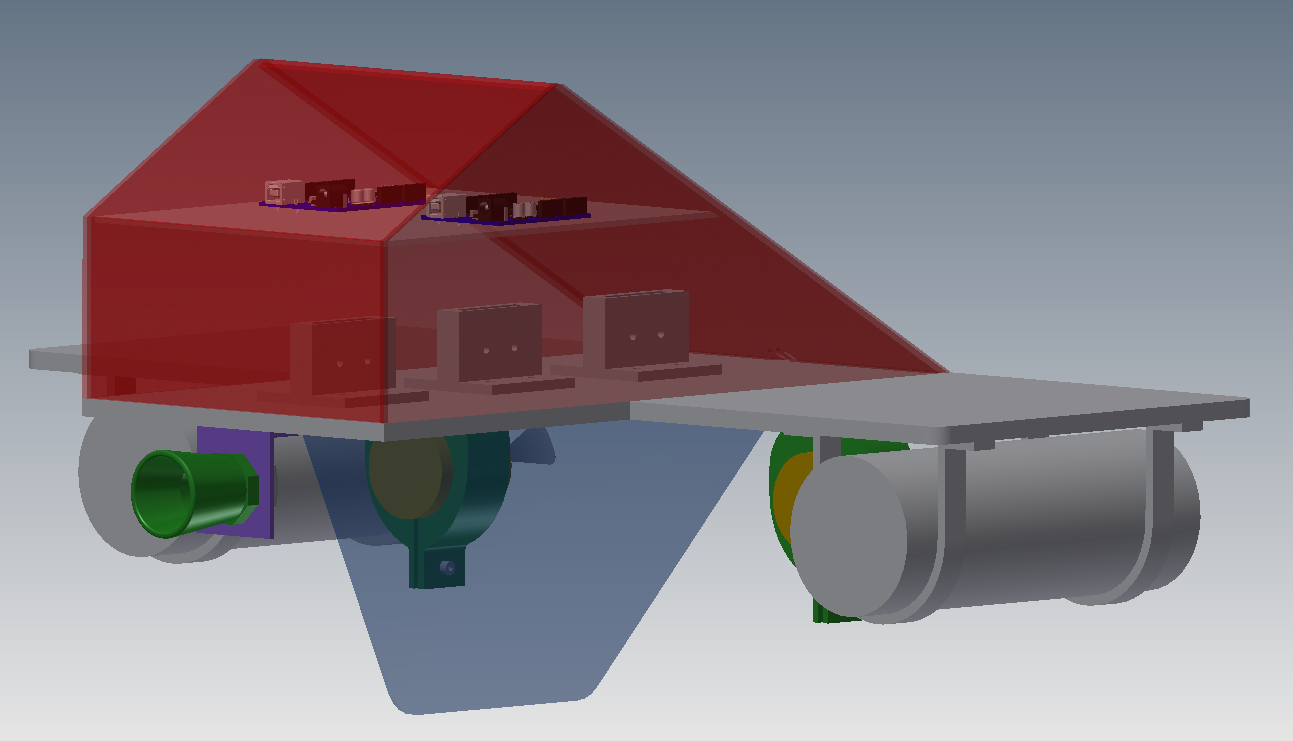
Wondering how our vehicle will look like when the motor turn? Let's go to the link below to explore it! :D
Parts
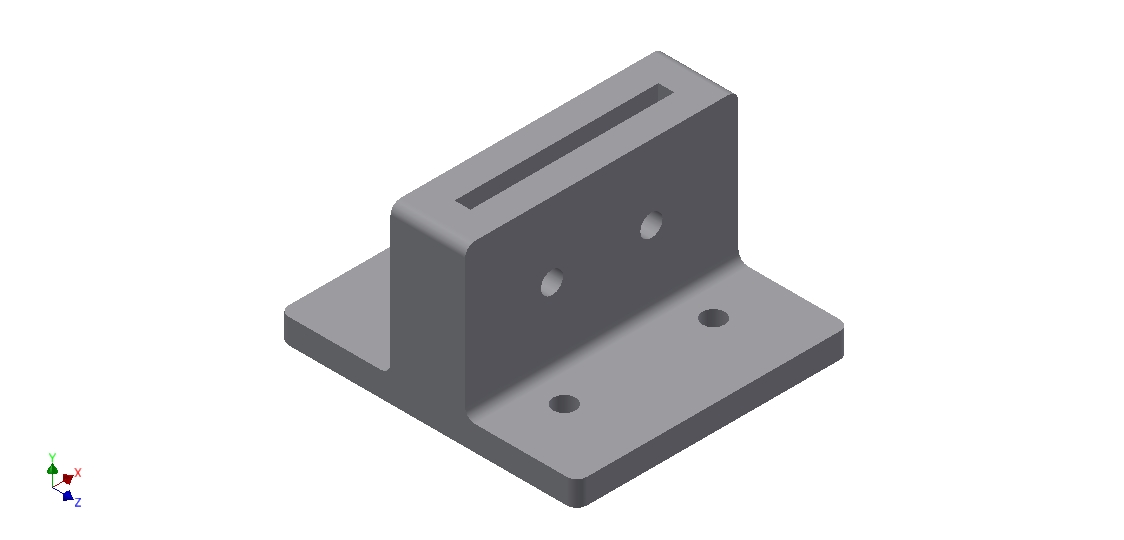
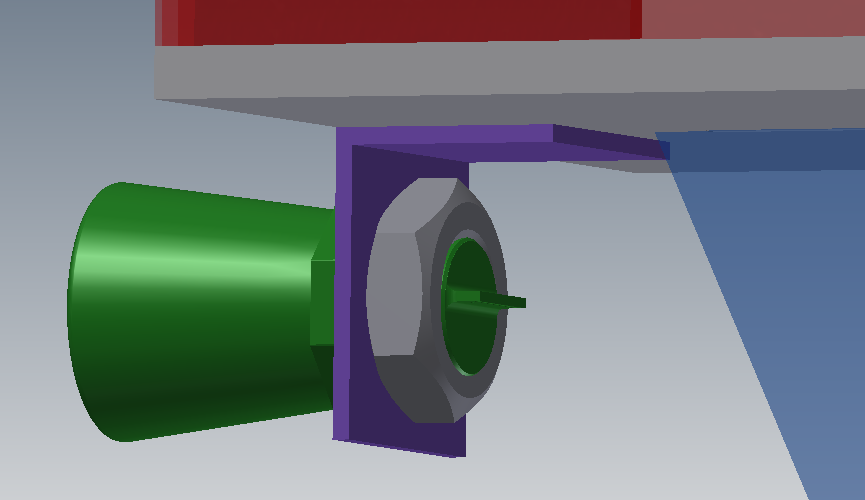
- Motor bracket ( Quantity: 2 )
- Material : 3D print thermoplastic
- The hole of the bracket is best fit to the motor, it is to hold the motor tightly underwater.
- There are 2 slits on the bracket to give tolerance to hold the motor.
- A hole is created on the above slit so that we can put in screw and lock it with nut.
- When the slit is pressed by the screw and nut, a compressive force will acted on the motor hence the motor is holded tightly in the bracket.


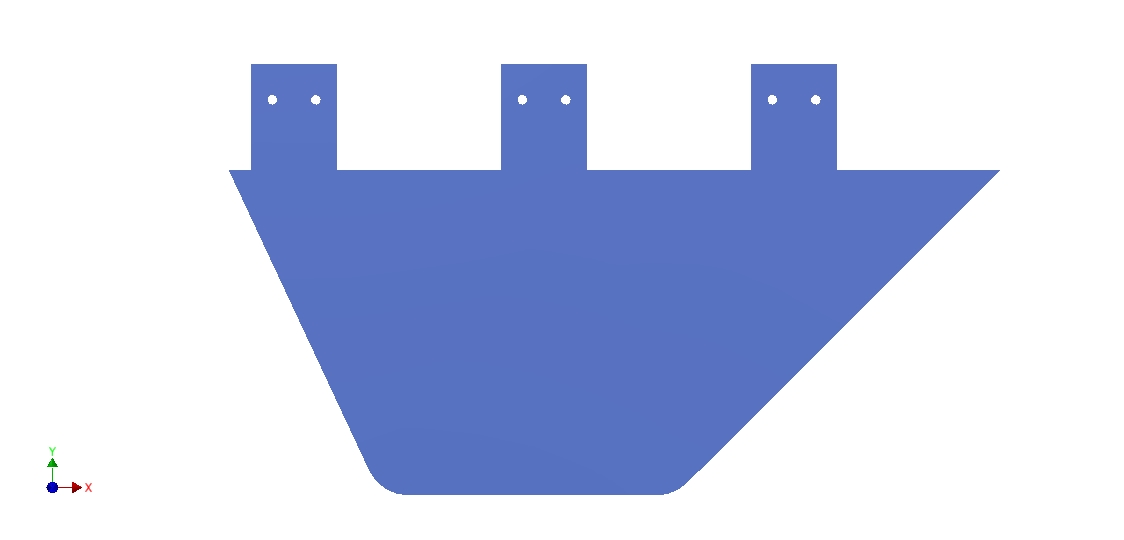
2. Keel ( Quantity : 1 )
- Material : Acryllic
- Its function is to balance our product movement on the water. This is important as our aim is to control the product to move in a lawn mower pattern.
- There are 3 extruded parts on our keel to fit into the slits of the base.

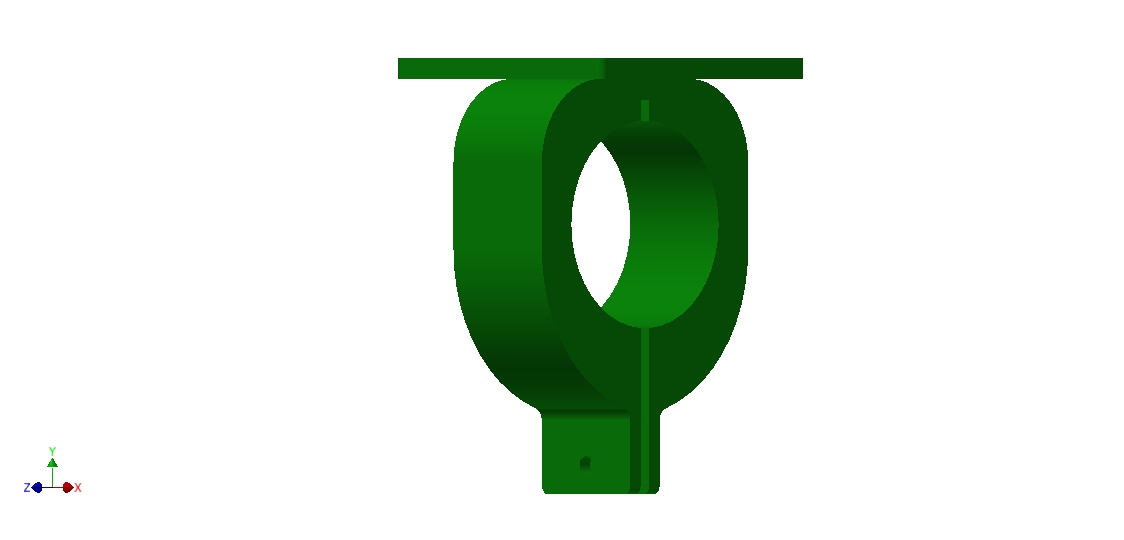
3. Keel Holder ( Quantity : 3 )
- Material : 3D print thermoplastic
- Its function is to hold the keel.
- The extruded parts of the keel will fit into the hole of the keel and then we can lock it with screws and nuts.
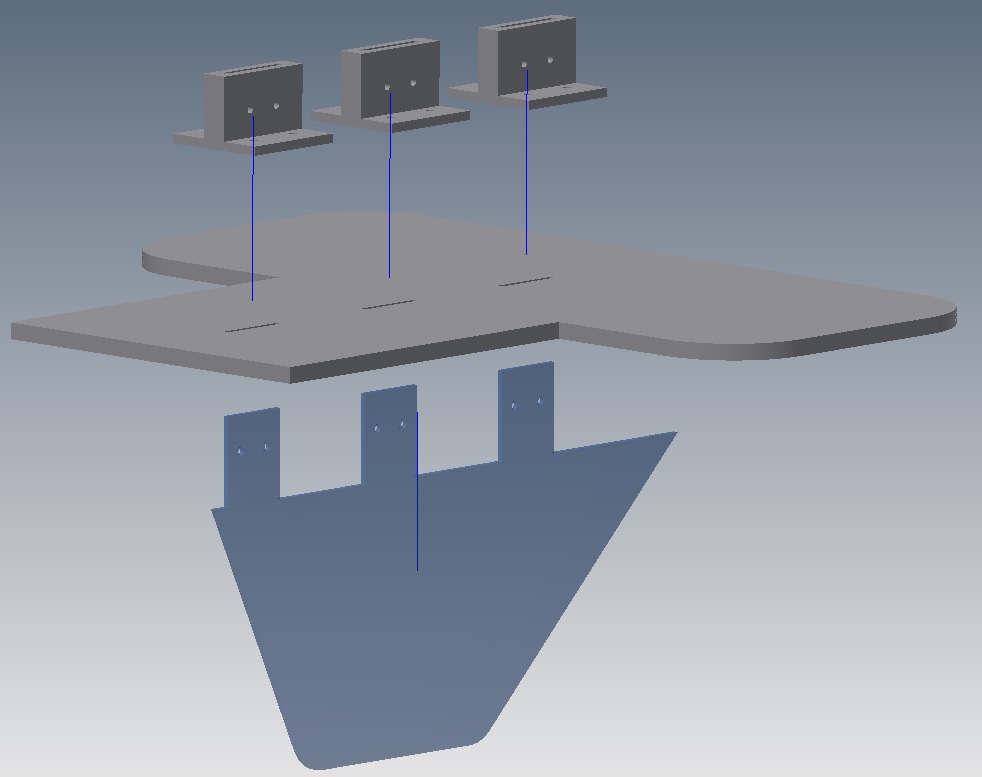
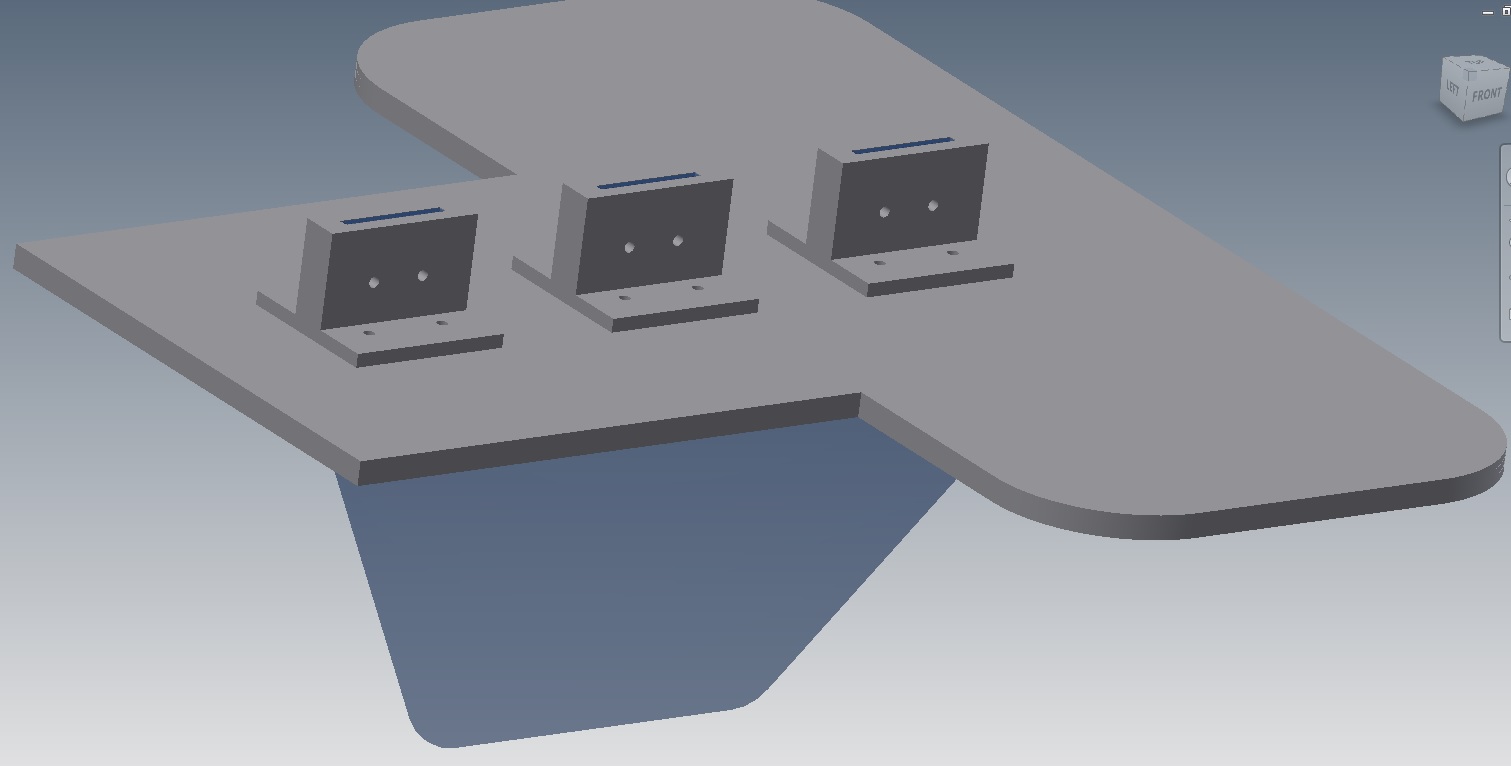
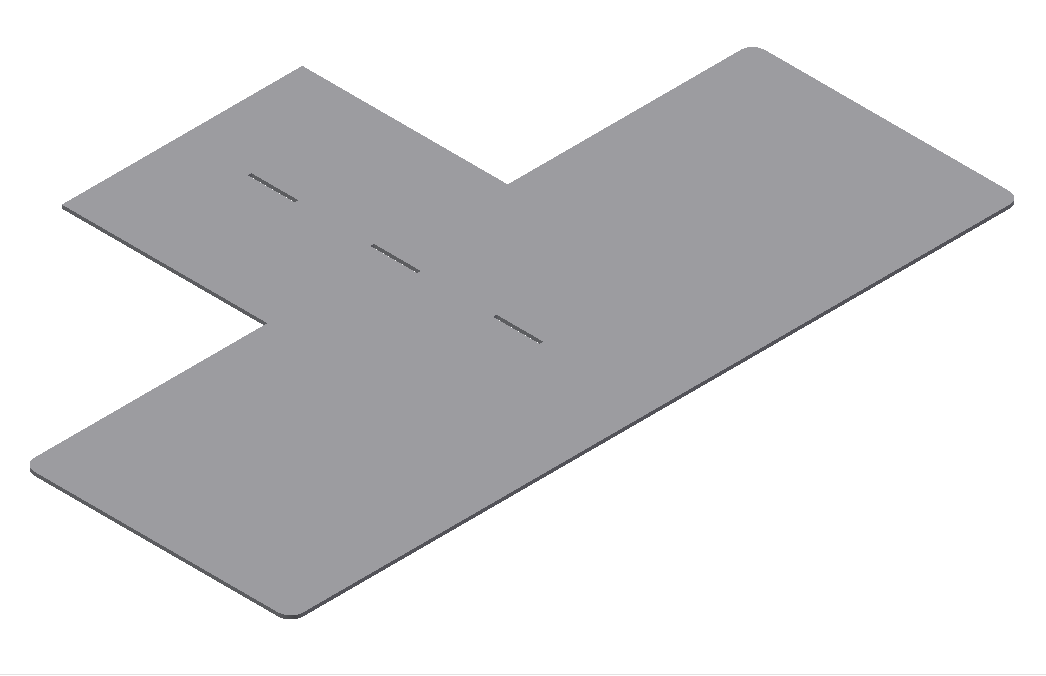
4. Base ( Quantity : 1 )
- Material : Acrylic
- It is made of acrylic, which can be achieved by laser cutting in Fab Lab.
- The thickness of this base will be 9 mm. Hence, 3 piece of acrylic base will be stacked together.
- The base has 3 slits for the keel to slide in.
- This base is designed in a T-shape instead of rectangle because this will increase the surface area. When the thickness is constant, the T-shape base will have larger volume. Hence, the volume of water displaced will increase which then increase the upthrust force (buoyancy force).
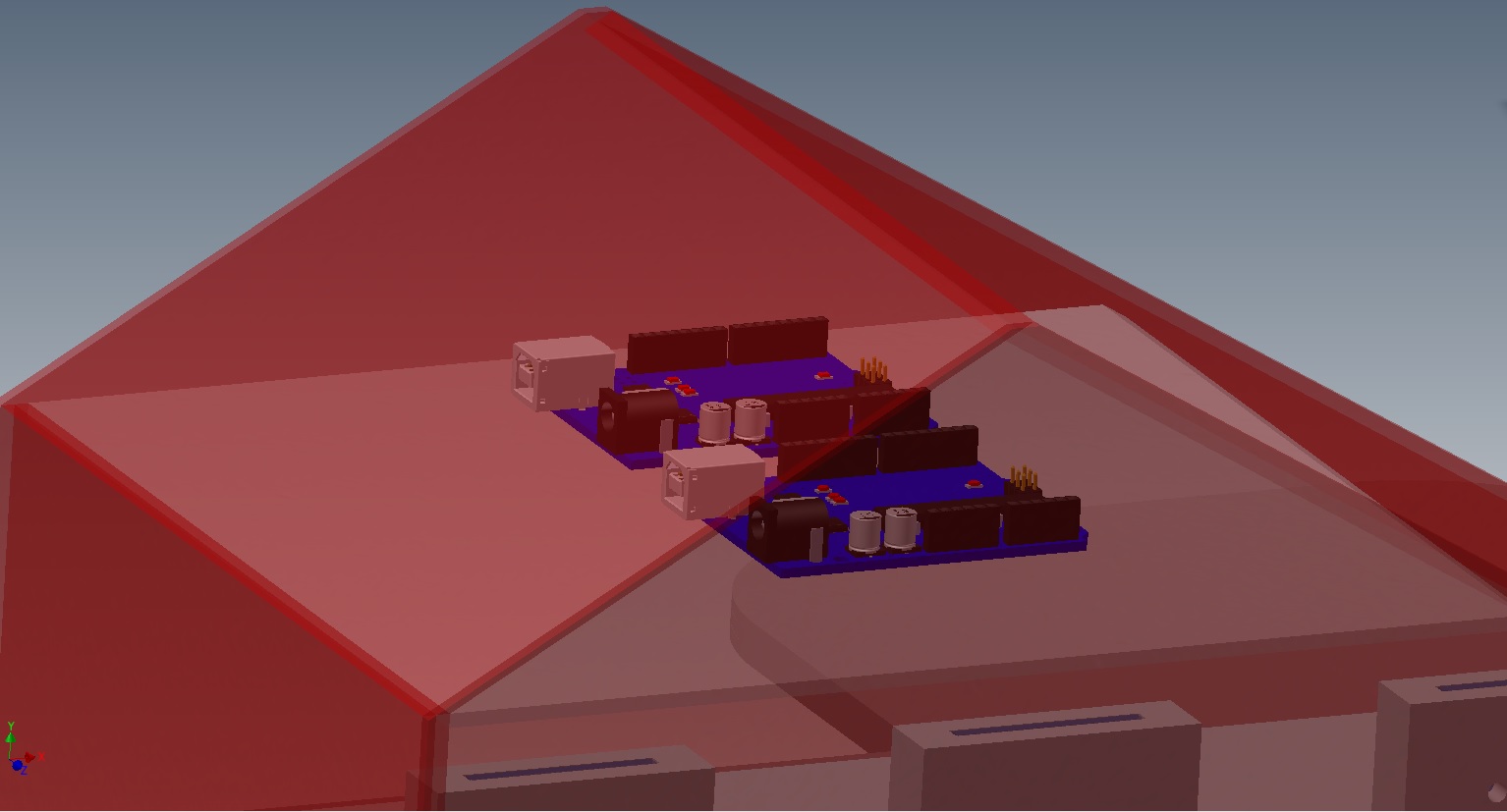
5. ‘Level 2’
- Material : Acrylic
- A piece of acrylic is located in the middle of the body structure, the position is far above the water level.
- This level is to locate all the electrical stuff like arduino boards and etc.
- This can ensure that the electrical stuff will not have chance to in contact with water if the water flow into the base of vehicle.
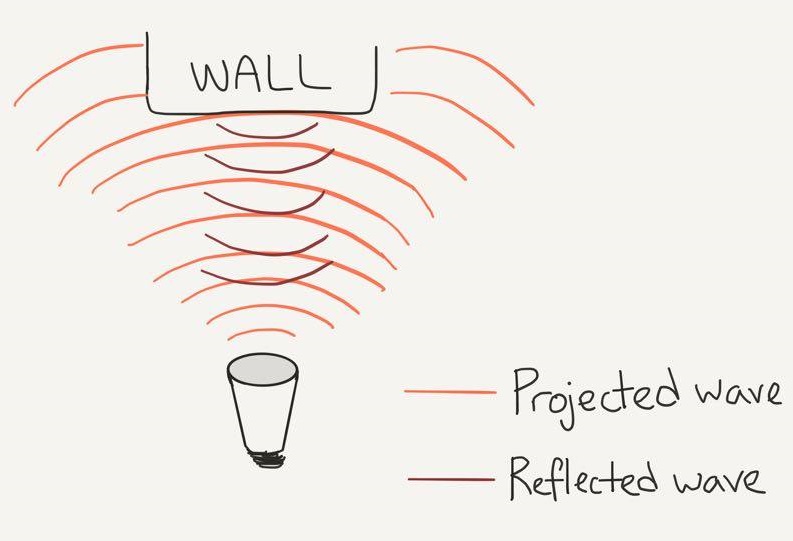
6. Ultrasonic sensor ( Quantity : 1 )
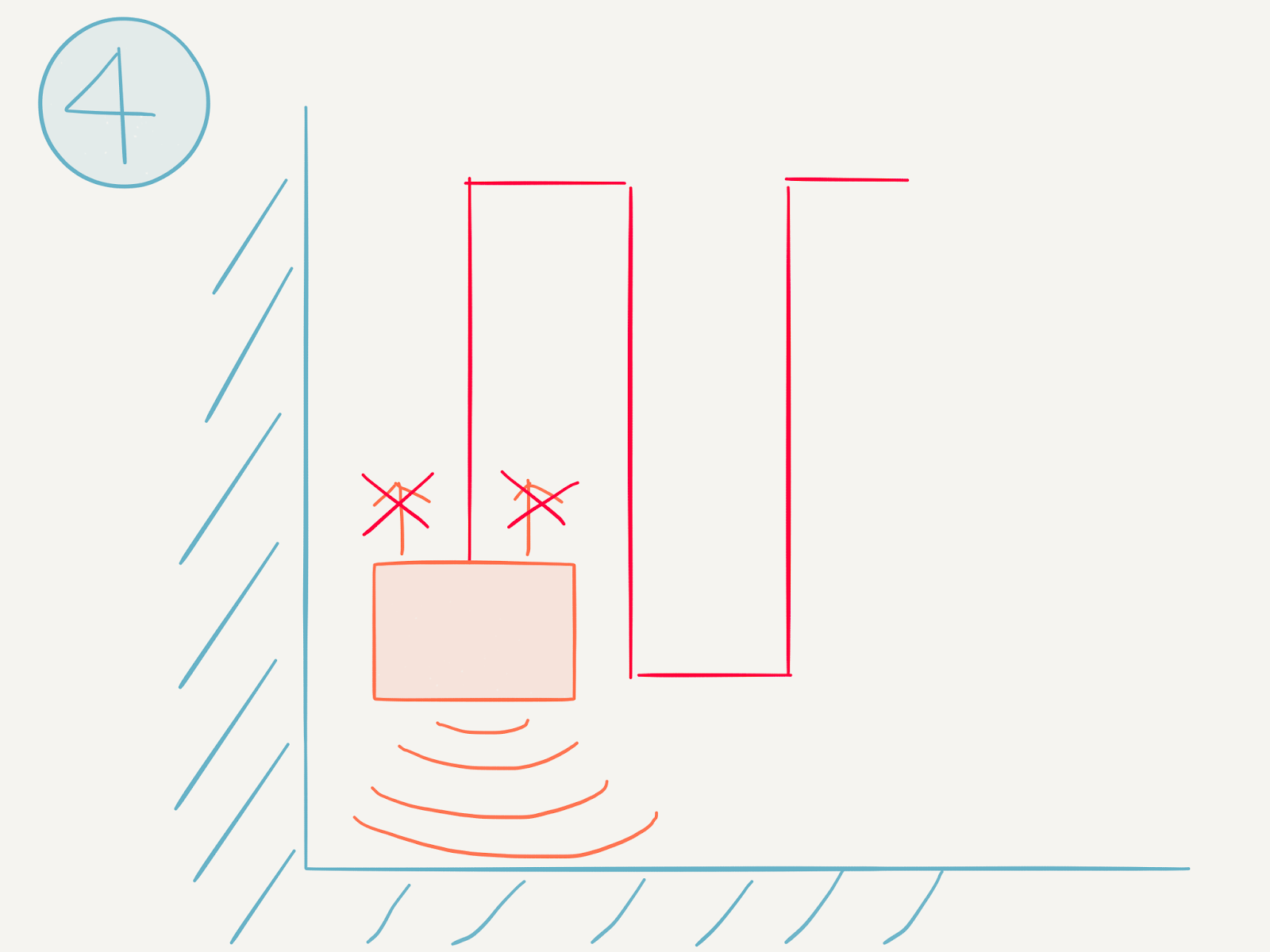
- The ultrasonic sensor need to be located under the base which is submerged in the water to detect to wall in front.
- When the ultrasonic sense the wall in front, it will send signal to the arduino and then a signal will be sent to the motor, commanding it to slow down and ready to change direction.
- Hence, a bracket is made to hold the ultrasonic sensor and mount the bracket to the base by using screws and nuts.
- The end of the ultrasonic sensor is threaded, the part can be inserted into the hole at the bracket and tighten it with a nut.

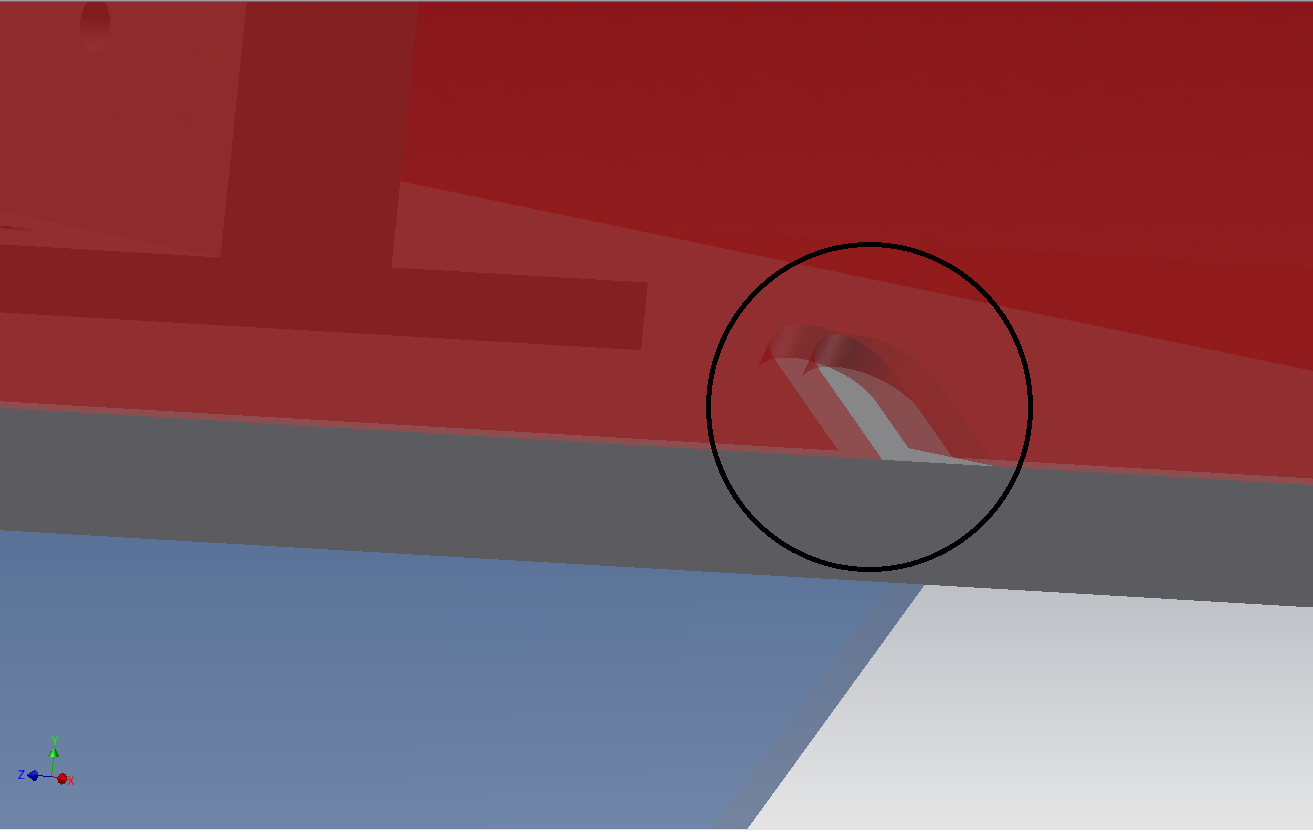
7. Temperature sensor ( Quantity : 1 )
- There is a hole at the back of the vehicle for the temperature sensor.
- The temperature sensor is connected with the arduino uno will pass through the hole and dip into the water to measure the temperature of the surface of water.

8. Pipe ( Quantity : 2 )
- The two pipes are located at the two sides of the vehicle to increase the stability of the vehicle on water and they act as floating elements.
- The two pipes are located at the far left side and right side to achieve stability of vehicle on water.
- The pipe diameter can be determined by calculation of buoyancy force in order to make sure that the volume of water displaced is enough to support the vehicle to float on water.

9. Pipe Bracket ( Quantity : 4 ) *2 at each side*
- Material : 3D print thermoplastic
- Its function is to hold the pipes.
- It has a U shape for the pipe to fit in.

Different perspective
TOP VIEW

FRONT VIEW

SIDE VIEW
BACK VIEW

Block Diagram
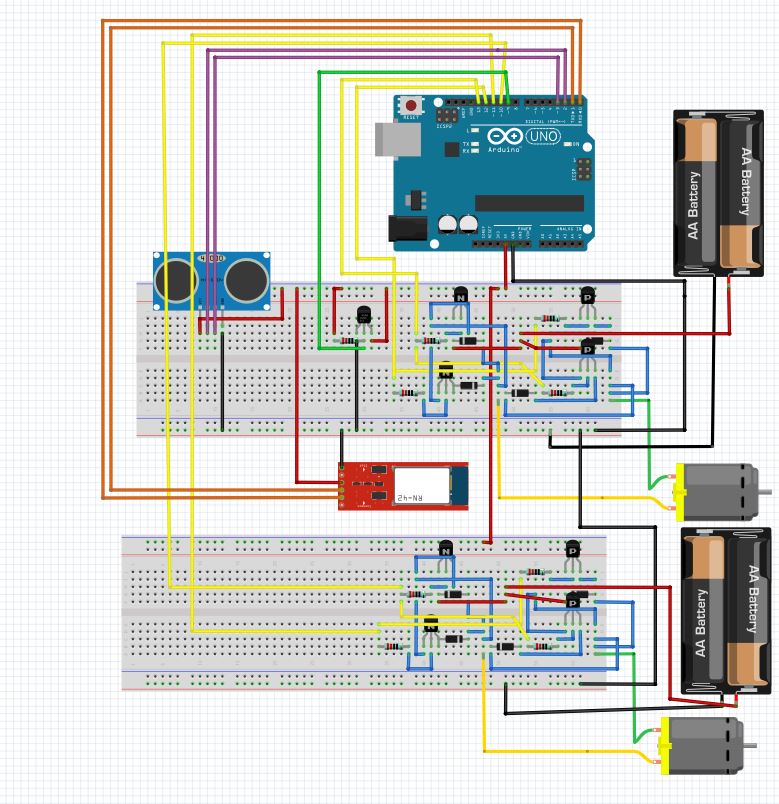
Circuit Diagram
How does the vehicle work?
- Firstly, we have to decide and set the first turn direction,either left or right. For example, if we put our vehicle at the right of the reservoir, there is a wall at the right side so we set the first turn to be left direction. When the vehicle activates, the motor will run and the vehicle will move forward.

{kind=link}
- When the ultrasonic sensor senses wall in front, the arduino will send signal to the motor to stop it. After a few seconds, the arduino will send signal again to the left motor to turn in reverse direction and right motor remains in forward direction. Thus now the vehicle will turn to left.

- After turning left, both motors will turn in forward direction for a few seconds.After a certain distance, the vehicle turns left again by using reversing the left motor and forwarding the right motor. Then the vehicle will continue to move forward and collect temperature.( For the program, if we set the first turn to be left, then the second turn will be right, this is a constant and consistent pattern.)

- When the vehicle reach the end, it will sense the front wall and make a left turn. Yet, it will sense another wall again so the arduino is programmed to cancel all the operations and the vehicle will stop at there.
- When the operations are done, the vehicle will send a message to the phone apps to inform the user that the vehicle are ready to collect. Then the user can use manual control to bring back the vehicle to the original position.
Thank you! Do leave your comments below to improve our vehicle. :)
Great report! Would adding a compass help you in turning 90 degrees when detecting the wall? You could do this by trail and error method to tune your robots but it maybe very painful. Perhaps this is what you may want to do right away to understand the motion when you get your motors. Also you need to calculate your turning radius of your vehicle so that it makes a safe turn.
ReplyDelete