Time flies, our MST break had came to the end and we are looking forward to start our second term of semester two. Now, we would like to share with you what had done by us for the project during the holiday. Our project is to make a vehicle which can move on water in lawn mowing pattern and able to detect obstacles. We also made a phone app to receive the value from the temperature sensor of the vehicle. For the electrical part, we had done with the temperature sensor during the previous activity in class but we need to test it again to make sure it works.

Temperature Sensor
The second thing that we did was the ultrasonic sensor. We need ultrasonic sensor to avoid our vehicle to hit the obstacles when it move by itself automatically. We search about the ultrasonic sensor online and also how to connect it to arduino. The image below is the simple connection which we used to test our ultrasonic sensor.

Ultrasonic Sensor
Besides that, we also create a phone app to receive data from our vehicle through the bluetooth. At first, we do not know how to do these because we never done this before. So, we do some research and we managed to find a website which can be used to make the app. The image below is the is the app and bluetooth connection that we make to test the data received.
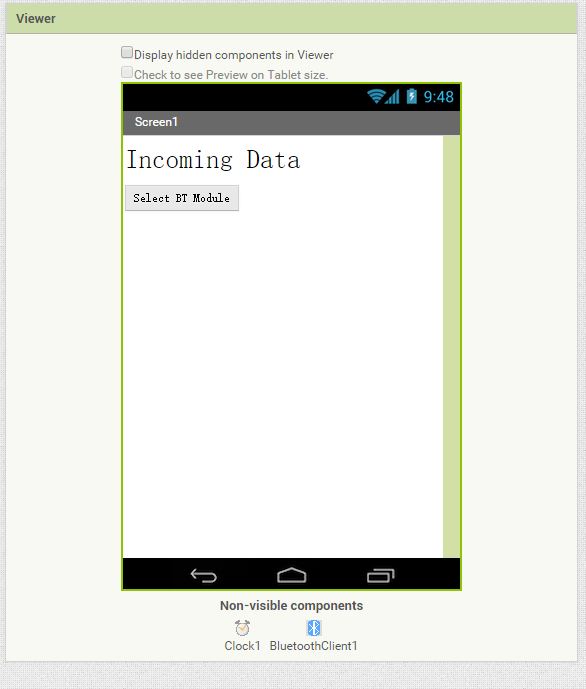
App for receiving data

Bluetooth
The videos below are the testing of our bluetooth:
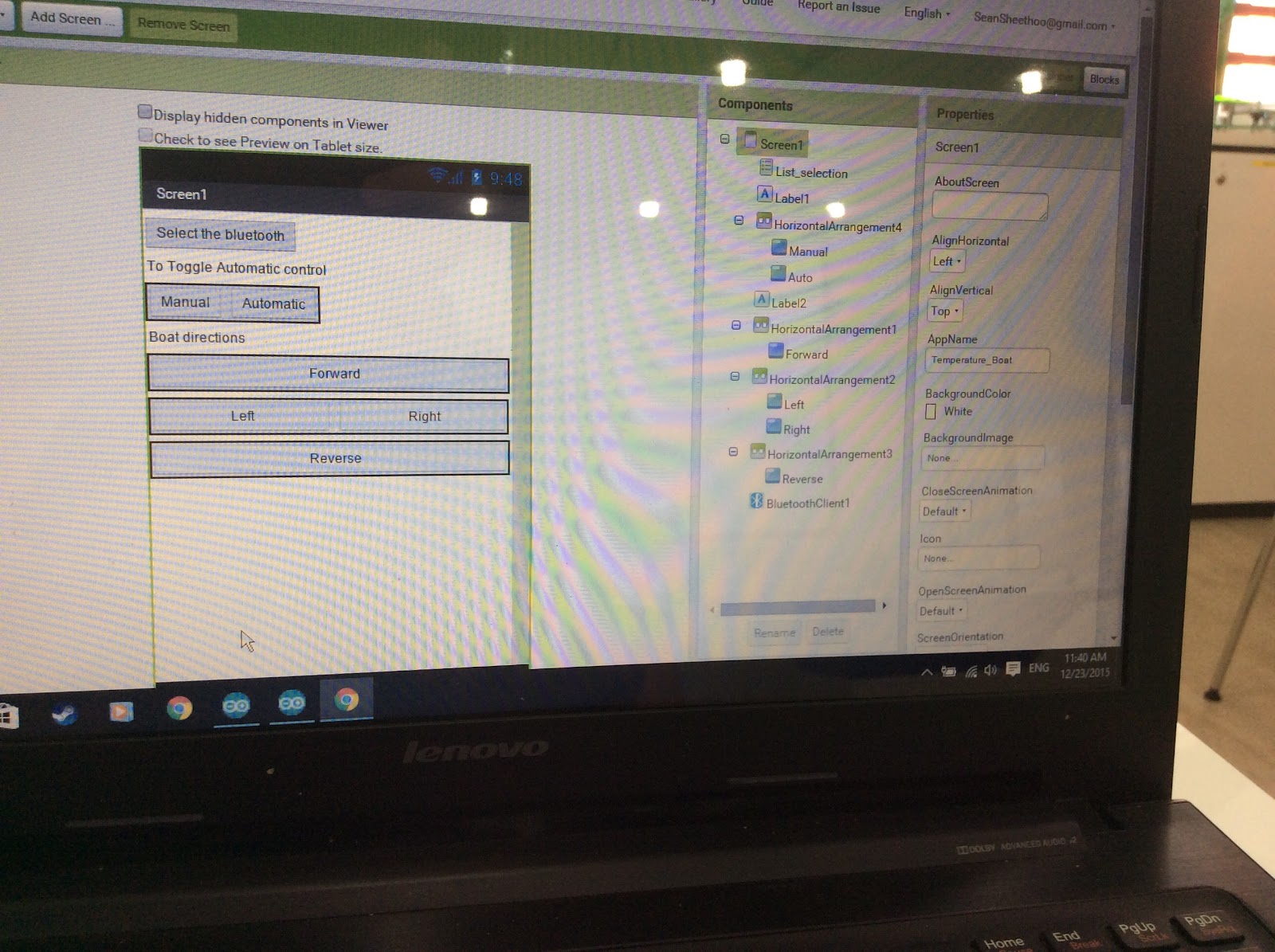
Besides receiving data from our vehicle, we want to control the movement of our vehicle manually by pressing the button on our phone. We also want to change it to automatic movement using the phone app. For the automatic part, we use compass with arduino code to control the movement of our vehicle, so that it can move in lawn mowing pattern. The image below is our circuit for compass and temperature sensor. The sensor will be put 2 cm below the surface of the water as the actual surface temperature will not be accurate due to sunlight rays heating the surface increasing the value as compared to the actual value.
Last but not least, we would like to talk about the arduino code that we had done and combined so far, the idea behind the code was to combine the ultrasonic sensor and compass together for the auto part. We used a bit of math combine with coding logic as the base of our code. When the ultrasonic sensor detects an obstacle it will stop moving and take the compass reading. Then it will refer to a counter which counts the number of turns it has made already. If the number is even it will make a right turn. It does this by taking the compass reading and adding 90 degrees to it. Then it will move forward for a bit before turning right again. For left turns it minus 90 degrees instead. Using this idea we are able to achieve the lawn mower pattern. We also included a manual over take function which allows the user to manually control the boat using the app.
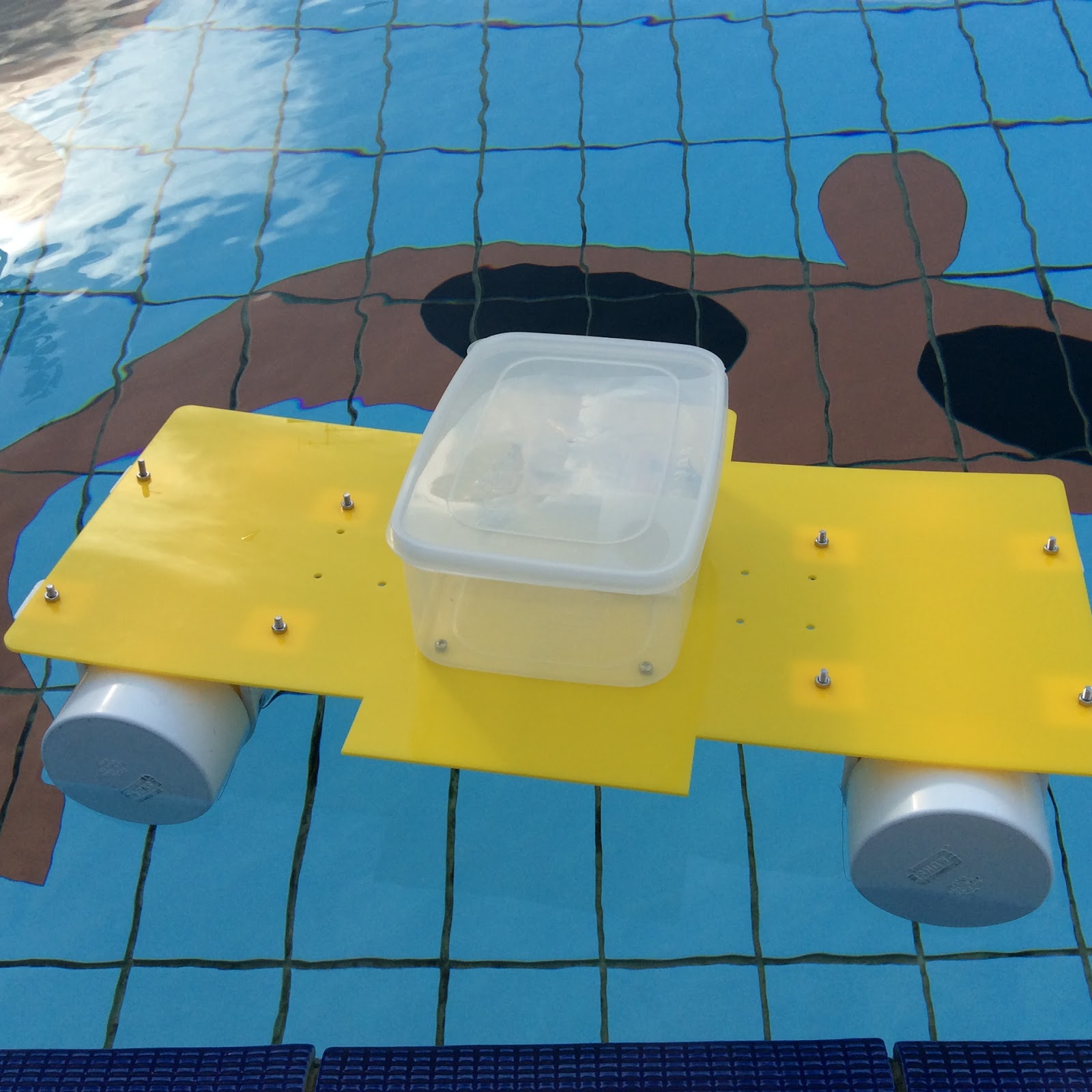
As for mechanical side, we have made some modification to our previous concept design in order to make our product as simple but efficient as possible. We have changed the aeroplane-like acrylic body structure by replacing it with a tupperware as Mr. Tune has suggested us. The acrylic and tupperware serve the same function which is to hold and protect the electrical components from water.
Not only that, we have also done the most important job of our product, which is to waterproof the motor. Firstly, we cover the small holes of the motor with epoxy and big holes with insulator tape. Epoxy and tape covering the holes allow the silicon sealant to be applied around the motor. After that, we apply the silicon sealant all around the motor. Without the epoxy and tape, the silicon sealant sealant would flow into the motor which may jam the motor. Silicon sealant is a white substance used to block the passage of fluids through the surface or joints or openings in the materials, a type of mechanical seal. Do take notes that the silicon sealant cannot be in touch with the contact of the motor case and the shaft, otherwise the shaft is not able to rotate. After that, we attach the propeller to the motor shaft by using the epoxy. At last, we seal the contact of the shaft and motor case with the grease. Applying grease must be the last step as after that, we cannot apply other sealant as the sealant will not stick on the surface anymore.

Silicon Sealant

AB Epoxy

First try : Attach the propeller to the motor using hot glue
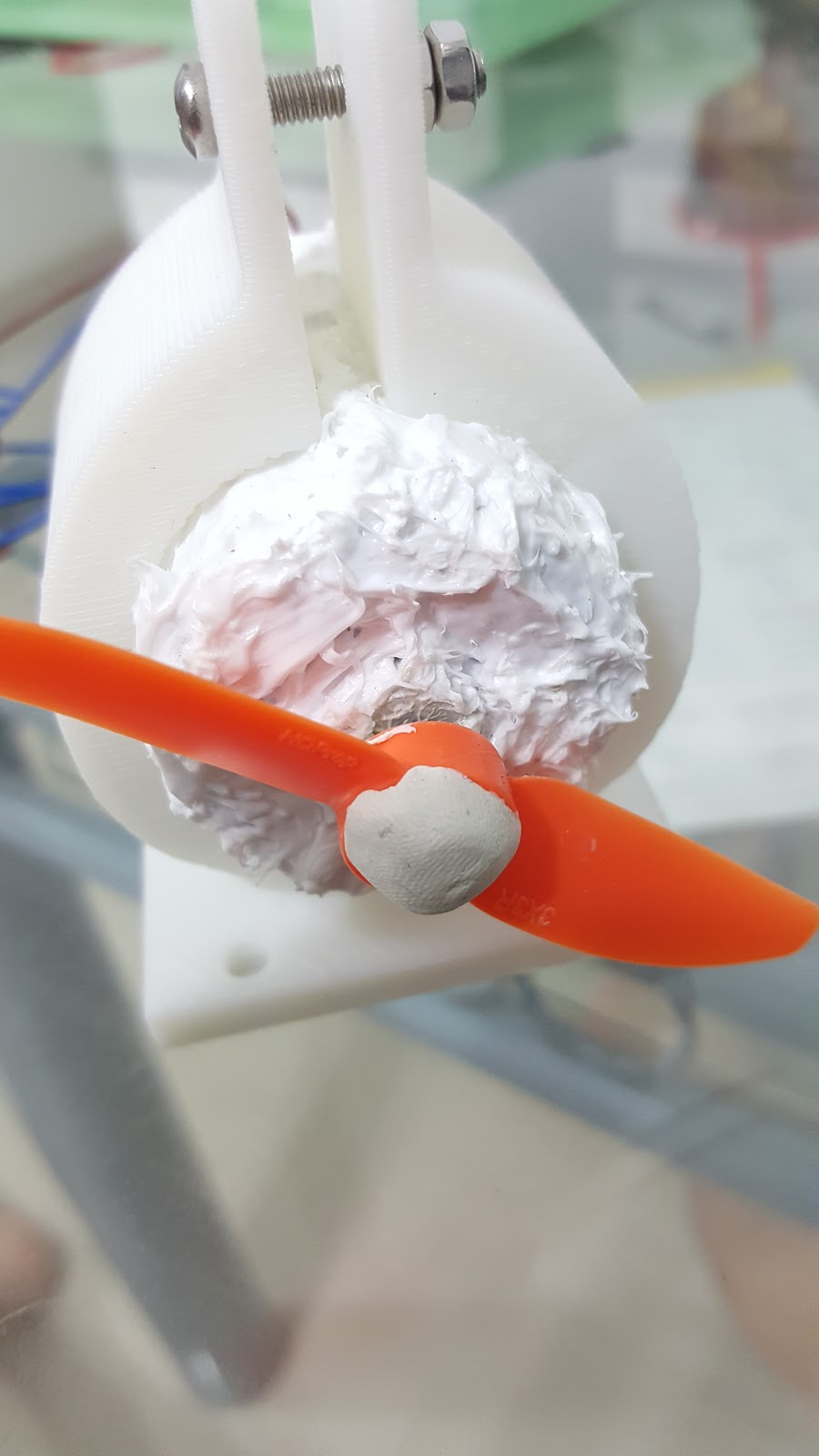
Second try : Attach the propeller to the motor using AB epoxy

Waterproofed water is clamped in a 3D printed motor bracket
Furthemore, we have made calculations to make sure our product float on water. Getting the volume of water displaced needed, we buy the size of of pipes that we need from the hardware shop in Clementi. We have also purchased 4 pipe brackets hold the pipes and 4 caps to conceal the pipes.
After we assemble the pipes, motors and tupperware to the base, we noticed that there are some design flaws we may need to put more concerns:
- The prototype is tilted forward when floating on the water as the pipe is located off the middle. This is a serious issue because if the prototype runs in a tilted direction, the prototype will move inwards to the water instead of moving forward on the water. This issues can be solved by adjusting the location of the pipe on the bracket .
- The middle part bends downwards. This may cause the prototype to break in the middle part and reduce the lifetime of the prototype.



That’s all for now. Thanks for reading our blog. We will show you how to solve the design flaws in the next post. So stay tune! :D
No comments:
Post a Comment